Робот с двумя пальцами смог схватить монетку со стола и собрать гайки
-

- 01.07.2021, 00:45 864
Ученые смогли научить робота манипулировать крошечными предметами и собирать их со стола всего двумя пальцами.
Он умеет переворачивать, поддерживать и приподнимать монетки, винтики и даже листочки бумаги весом менее грамма и толщиной в полмиллиметра. Статья доступна на сервисе препринтов arXiv.org и принята к публикации в IEEE Robotics and Automation Letters.
Видимо, хоть раз в жизни вы сталкивались с тем, чтобы поднять какой-то маленький и плоский предмет, как-то клочок бумаги или кредитку со стола или пола. И это действительно непростая задача, ведь необходимо каким-то образом подхватить предмет и желательно не повредить.
Чтобы работы смогли собирать на заводе, например, телефоны, детали которых составляют от нескольких миллиметров, им следует научиться осторожно и с первого раза браться за винтики или проводками и манипулировать ими.
Например, для обычного параллельного захвата, когда работы хватают предметы с двух сторон, существует предел толщины объектов. И можно было бы удерживать их, как это делают люди, ногтями. Однако, из-за небольшого веса робот может не удержать предмет и он вылетит еще во время хватания — у робота с выдвижными ногтями предметы толщиной до 0,2 миллиметра оставались в руках только в 60 процентах случаев. Можно попробовать засасывать такие предметы, но поверхности этих предметов должны быть плоскими и не иметь отверстий.
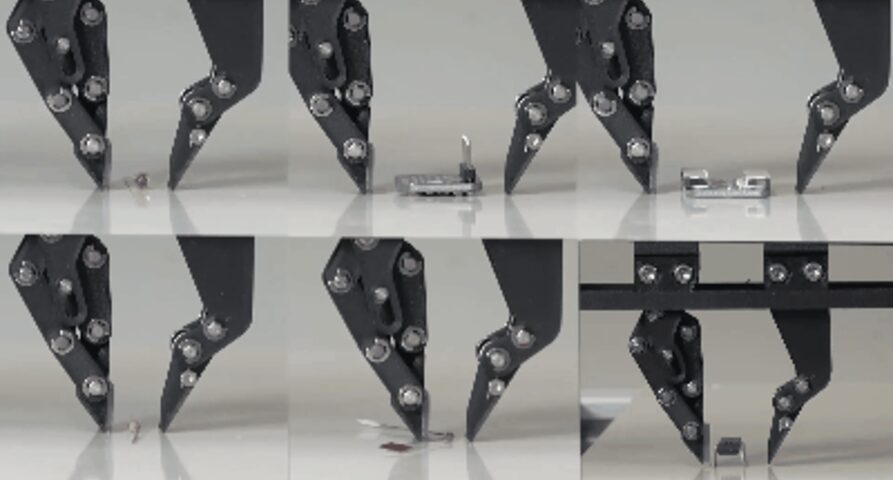
Новый метод захвата мелких предметов реализуется с помощью двупалые манипулятора, который имеет два режима. Он может браться за предмет параллельно с обеих сторон, но может и разворачивать пальцы, чтобы приподнимать его или придерживать. Эксперименты показали, что робот может захватывать несколько типов предметов со стола, толщиной от половины миллиметра и весом от 0,007 грамма. Далее инженеры планируют проверить, сможет ли робот составлять эти предметы для конструирования небольших устройств.
Чтобы доказать универсальность захвата, было выбрано шесть элементов различной твердости, размеров и форм. Работа ученые тестировали на пальчиковой батарейке, кабелях, резиновых подушечках, скрепках, монетках, винтикам и других конструкционных деталях. Эти предметы обычно трудно удерживать человеческими руками — тот же кабель не схватить одной рукой или не использует край стола. Задача здесь заключается в том, чтобы брать эти предметы с плоской поверхности в едином положении и так робот справился со всеми, ожидается, что он сможет обрабатывать широкий спектр предметов с аналогичными размерами.
В режиме параллельного захвата он смог схватить монету толщиной 1,3 миллиметра; однако уже не мог взять пружинную шайбу той же толщины — вероятно из-за того, что поверхность пружинной шайбы была гладкой, а поверхность монеты неровной. Эту толщину инженеры определили как предельную. Однако, в режиме с поворотом пальцев робот взялся и за тонкие, причем схваченный ластиковый пакет, уплотнительное кольцо и виниловое письмо указывают на то, что режим переворачивания можно использовать для захвата предметов. Хотя точность размещения предметов не была главной целью, робот может поместить предмет в исходное положение в обоих режимах захвата. Также выяснилось, что манипулятор является достаточно прочным, потому что пальцы не ломались даже при добавлении внешней силы, которая превышает 30 ньютонов.
Результаты также показывают, что робот может работать на поверхностях с канавками или отверстиями — он остается функциональным до тех пор, пока оба пальцы не застревают в канавке или отверстии во время захвата. Следить за тем, как робот справляется самостоятельно с задачами можно будет с помощью цифровых весов на столе, или камеры.
Также ранее мы писали о роботе, который научился удерживать предмет на подносе, новое учебное среду, поможет манипуляторам лепить из пластилина и есть палочками.
Перевод материала nauka.ua