Робот различил на ощупь 10 различных поверхностей пальцами
-

- 19.07.2021, 01:02 695
Американские инженеры помогли работу почувствовать на ощупь десять различных поверхностей с помощью тактильных сенсоров из жидкого металла.
Своими четырьмя пальцами манипулятор проводил по поверхности, «скользил» ею, и так мог определить с 99% точностью различные текстуры. Причем он одновременно может идентифицировать разными пальцами. Свою разработку ученые планируют использовать для улучшения взаимодействия роботов со средой. А также для протезирования рук. Статья опубликована в журнале Sensors.
Избранные нами (или работами) стратегии взаимодействия с окружающей средой во многом зависят от ощущения прикосновения. Работам было бы полезно научиться разбираться со средой «с первого прикосновения», где они могли бы найти общий язык и с предметами, с которыми должны работать, и с людьми рядом. Но для инженеров передать ощущение прикосновения работу является совсем нетривиальной задачей. С одной стороны, можно просто дать работу больше возможностей в управлении своими руками, чтобы он не смог случайно повредить что-то. Но с другой, это ограничивает сферы, где такого робота можно применить. Поэтому ученые склоняются к тому, чтобы научить роботов. Так появились тактильные сенсоры.
Для распознавания текстуры поверхности очень важно выбрать соответствующий тактильный датчик, который будет сочетаться с алгоритмами машинного обучения для классификации элементов поверхности. Среди различного сырья, используемого исследователями для изготовления сенсоров, со временем концепция использования жестких компонентов перешла к полностью гибким эластомерам. Они совместимы с традиционными микроэлектромеханическими системами, но при этом имеют больше преимуществ по сравнению с традиционными — высшее проводимость, эластичность, гибкость, упругость и растяжимость. Манипулятор со способностью распознавать особенности поверхности объекта может стать гораздо более автономным, а подобные разработки могут помочь восстановить нарушенное ощущение людям, использующим протезы.
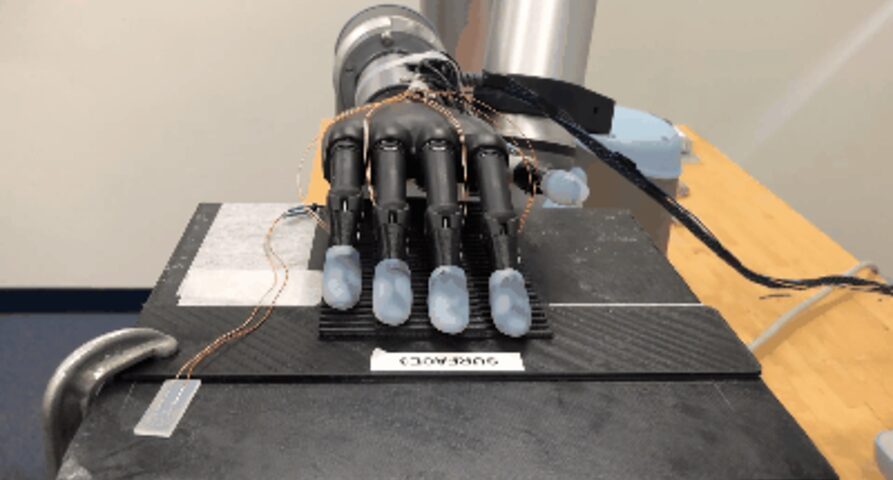
Инженеры разработали для манипулятора четыре пальца, подушечки которых сделали из силикона и жидкого металла — сплава галлия и индия. Затем на них нанесли рисунок из металлических проводов длиной в 0,75 сантиметра, закрученных подобно отпечаткам пальцев. Рука была запрограммирована прижимать пальцы к поверхностям и скользить ими. Замысел разработчиков состоял в том, чтобы робот распознавал текстуры по спектральным компонентам сигналов, поступающих через подушечки. Специально для своего замысла ученые разработали десять различных поверхностей, в которых был один переменный параметр: расстояние между гребнями от одного до четырех миллиметров. Для каждой из десяти поверхностей было собрано 20 испытаний, чтобы проверить способность алгоритмов машинного обучения различать и сгенерировать.
Таким образом работу удалось справиться с 99% созданных для него поверхностей, учитывая, что тренировался он всего на четырех примерах. Причем ему не обязательно было касаться всей «ладонью» — он мог различать поверхности и каждым отдельным пальцем, причем разные различными и одновременно. По мнению ученых, это яркий пример простой конструкции, которая не требовала долгого предварительного обучения и сложных составляющих — работу просто одели тактильные подушечки и показали, как ими пользоваться. Исследователи отмечают, если найти способ помочь людям заменить привычные тактильные чувства на восприятие поверхностей по сигналам от такого датчика, то их можно будет использовать и для удешевления протезов. Хотя возможно, что пользователь сможет научиться непосредственно интерпретировать искусственные ощущение прикосновения.
Это не первая новость, где мы рассказываем, как ученых волнуют тактильные ощущения. Например, недавно мы писали о том, как имплантированы сенсоры восстановили тактильную чувствительность крысам, а сенсоры электронной кожи заменили солнечными элементами, которые еще и могли накапливать для себя энергию. Больше о тактильной чувствительности в роботов можно почитать также в нашем обзоре роботизированных ощущений «Как работы смотрят на мир, какое вино им подходит и почему Маск снова против всех».
Перевод материала nauka.ua