Проприоцепция помогла искусственному пальцу отличить пластик от губки
-

- 08.08.2021, 01:15 680
Китайские инженеры несколько изменили подход к тому, каким образом можно передать работу тактильной чувствительности, и попытались сделать это с помощью проприоцепцию.
Так роботизированный мягкий палец получил человеческое мышечное чувство, которое определяет положение конечностей в пространстве, и смог отличить пластик от губки с почти 100% успехом. Прототип ученые представили на конференции ICCMA 2021, а статья доступна на сервисе препринтов arXiv. Из наших пяти основных органов чувств, которые помогают нам воспринимать окружающий мир, то есть зрения, слуха, вкуса, обоняния и осязания, у нас есть «шестое» чувство, порождаемое действиями нашего собственного тела. Это ощущение положения и движения наших конечностей, ощущение мышечной силы и усилия, а также чувство равновесия. От нее зависит то, что мы ровно стоим на ногах, и то, насколько точно мы взаимодействуем с миром. Существует много исследований того, как наше тело способно это делать. В общем ученые предполагают, что для согласования, например, положение рук мозг воспринимает их как антагонистов и считывает разницу сигналов от них поступающих. Также мозг учитывает и чувство усилия или тяжести от наших мышц. Наше ощущение тяжести тесно связано с Проприоцепция — например, чтобы сравнить два предмета на вес, мы их приподнимают вверх. Также кроме механорецепторов, которые реагируют на внешние сигналы, мозг даже реагирует на положение суставов. Например, в человеческих пальцах такими нейронными агентами будут мышцы, сухожилия и суставы, обеспечивающие обратную связь как от их положения, так и от растяжения (деформации).
В бионических конечностях разработчики все чаще обращаются к мягким материалов в силу их гибкости, податливости и лучшей сочетаемости с другими модулями. Однако все еще главной проблемой роботизированных рук является невозможность получения адекватной сенсорной информации. У человека подобные рецепторы распределены по всей поверхности руки на разной глубине, они чувствительны к сигналам разной частоты и вместе определяют силу контакта с поверхностью, жесткость объекта и его текстуру, чтобы помочь мозгу найти к нему подход. Поэтому и роботизированным рукам стоит научиться имитировать нашу систему сенсорно-моторной обратной связи. До сих пор для измерения контактной жесткости пальцы роботов оценивали контактное усилие и смещение через кинематические модели конечностей. Для мягких пальцев ситуация осложняется именно из-за тяжести построения такой модели. Пока мягкие манипуляторы пользуются поверхностными датчиками, имитирующий поведение поверхностных механорецепторов, клеток кожи, ответственных за кожное восприятие. Но таким сенсорам необходимы точные прикосновения, потому что работу достаточно с какого неверной стороны коснуться предмета, чтобы алгоритмы уже не могли считать информацию. А искусственная Проприоцепция по мнению исследователей, может и собрать широкий спектр сенсорной информации, и будет совместима с мягкими материалами, и не требовать сложных механизмов.
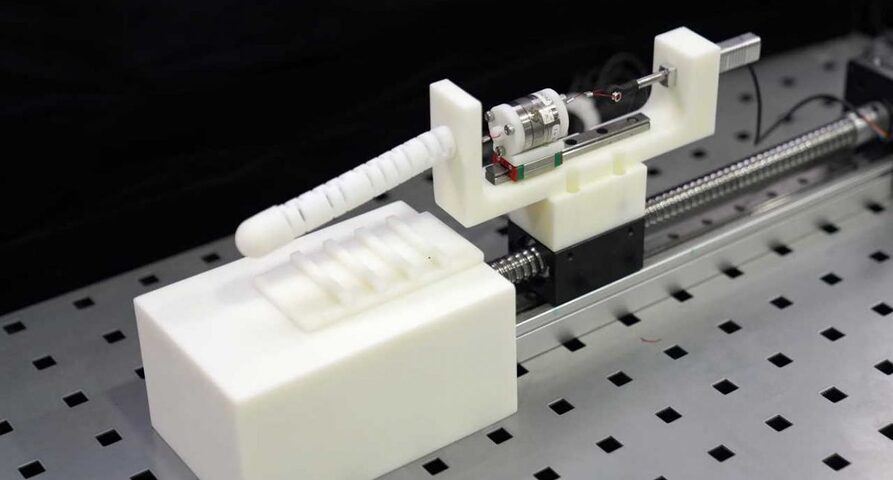
В своей работе ученые разработали прототип роботизированного пальца сплошной конструкции с выступами для деформации, что позволяет сгибать и разгибать палец. Прототип сделали из нейлона и стального стержня, который приводит в движение конструкцию диаметром в пол сантиметра. Кончик пальца изготовили из полиуретана, чтобы обеспечить больший контакт с поверхностями. В основе механизма лежит датчик усилия и крутящего момента, которые учитывают деформации при касании, информацию о которой затем обрабатывают алгоритмы. Так сначала работа направляют к предметам так, чтобы контакт с текстурной пластиной был под углом 40%, затем он движется со скоростью 15 миллиметров в секунду и передает информацию о растяжение или сжатие сухожилий. Также палец прижимает объект на четыре секунды и так передает алгоритмам классификации величины разложенных компонентов Фурье на разной частоте от нуля до 30 герц. За ними он и может различить пять уровней жесткости: пластик PLA, твердую резину, губку и резиновую оболочку. Также ему удалось различить восемь текстурных пластин от совершенно гладких к предметам с различными канавками. В общем успех работа в распознавания составил почти полностью и несколько меньше с резиновыми поверхностями. До сих пор робототехники не обращались к проприоцепцию как метода тактильного распознавания, однако по мнению исследователей, их работа показывает, что даже при отсутствии точного контакта, возможно научить робота видеть мир на ощупь.
Ранее мы также писали и о других не совсем традиционных способах подарить работам ощущение прикосновения. Например, шотландские инженеры заменили сенсоры электронной кожи на солнечные элементы и дали роботизированной руке почувствовать края предметов и даже собрать для себя энергию. А жидкий металл помог пяти пальцам манипулятора различить десять поверхностей, поглаживая их, что ученые планируют применить для человеческих протезов. Больше о тактильной чувствительности в роботов можно почитать также в нашем материале о роботизированные ощущение «Как работы смотрят на мир, какое вино им подходит и почему Маск снова против всех».
Перевод материала nauka.ua